
BioLoco Research
Select by Tags:Gaits Rectilinear Sally Snakey All
Research supported in part by National Science Foundation. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Template by Bootstrapious.com & ported to Hugo by Kishan B
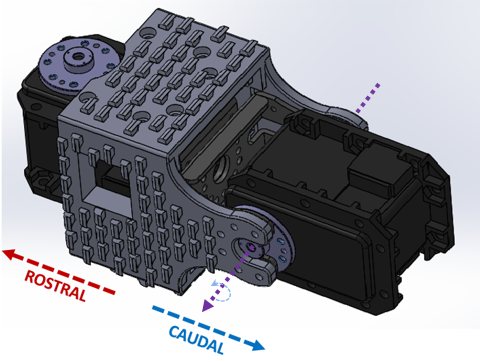
Creating Snake-Like Robot-Ground Interactions.
Abstract: To reproduce the locomotion modalities associated to snakes requires achieving the same robot-ground contact force interactions. Following the biomechanics literature we designed a robosnake scale chassis to put on each of Snakey's joints. Doing so improved locomotion stability.
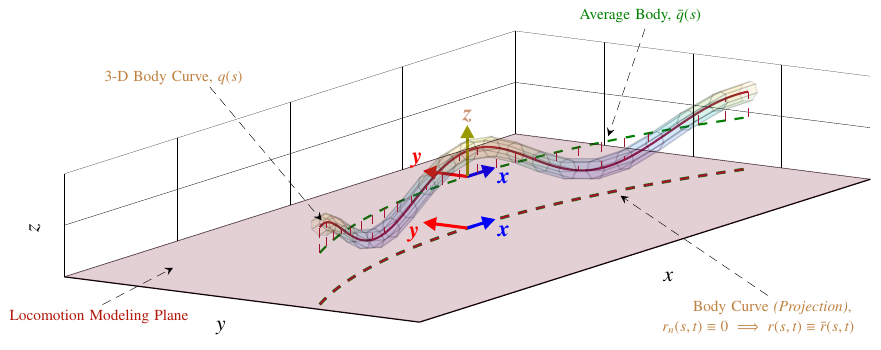
Modeling Planar Snake Movement.
Abstract When the correct representation for modeling snake movement is chosen, then deriving equations of motion for snake movement on a flat plane is fairly easy. Furthermore, one overall dynamic model provides a unified approach to modeling many different gaits. So far, we have modeled rectilinear locomotion, lateral undulation, and sidewinding. A turn-in-place gait is currently under study.
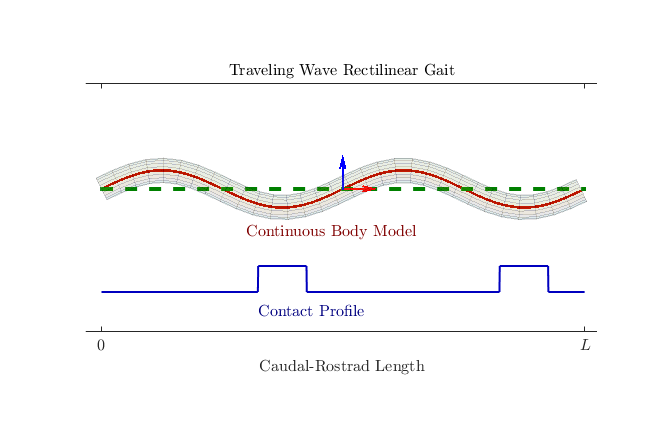
Rectilinear Snake Motion.
Abstract: Rectilinear locomotion is different from but analagous to caterpillar locomotion. The body undulates vertically to move forward. Curving the body leads to turning.

Sally the Supermander.
Abstract: The objective of this senior design project was to design and build a robotic salamander, then to realize some basic locomotion gait for it. Naturally, motor technology being what it is, this robot is bigger than your typical salamander.
Snakey SLAM-Nav
Abstract: Our lab also researches SLAM (Simultaneous Localization and Mapping) and Auotnomous Navigation. We thought it would be fun to combine these to see what we could get. Using a wireless camera, we gave it a shot.