
BioLoco Research
Select by Tags:Gaits Rectilinear Sally Snakey All
Research supported in part by National Science Foundation. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Template by Bootstrapious.com & ported to Hugo by Kishan B
Rectilinear Snake Motion.
Abstract: Rectilinear locomotion is different from but analagous to caterpillar locomotion. The body undulates vertically to move forward. Curving the body leads to turning.
The easiest gait to analyze, produce, and control is the rectilinear locomotion gait. It is not because the other gaits are necessarily harder to work out, but because rectilinear locomotion is so slow! That permits us the ability to use our overhead tracking system for performing closed-loop control without worrying about the snake going out of bounds. A few gaits of sidewinding and the snake isn't in the field of view anymore.
Rectilinear locomotion is a bit like caterpillar movement, but different in terms of the underlying robot-ground interaction. A travelling wave propogates from the back-end of the snake to the front-end. Doing so creates a rolling-like property that leads to forward motion. You can see an overhead video here. Because our snake is discretized, this forward motion is more of a roll, then slide, then roll, then slide, depending on whether the scales lie flat on the ground (slide) or they have angled contact with the ground.
Two visualized scenarios of closed-loop tracking of trajectories synthesized using optial control are depicted below. You can see sample videos of the snake in action at this playlist, for the scenarios depicted below. The playlist has different versions of our trajectory planning and tracking algorithms to date. The video are typically sped up 12x or so because rectilinear motion is quite slow. Our snake travels at around 22 mm/s. It really is a function of the discretized snake links, as they are the primary factor in not achieving the theoretically derived top speed (of around 150-200 mm/s).
The method and mathematics was first presented at ICRA in 2017 (abstract). An improved and extended version has been submitted for publication, while a more complete bendable model has also been implemented using the methods from our Bendable Lp paper. Snakey gets modeled as a tube. We are working on this publication.
Trajectory Planning and Tracking
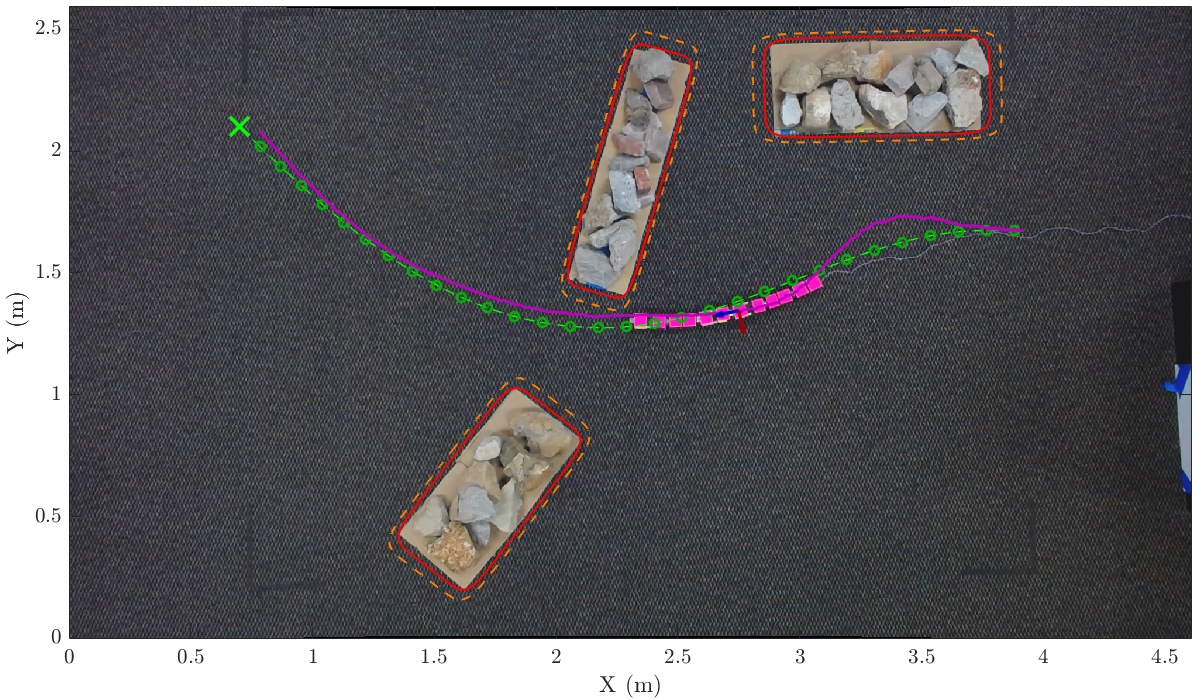
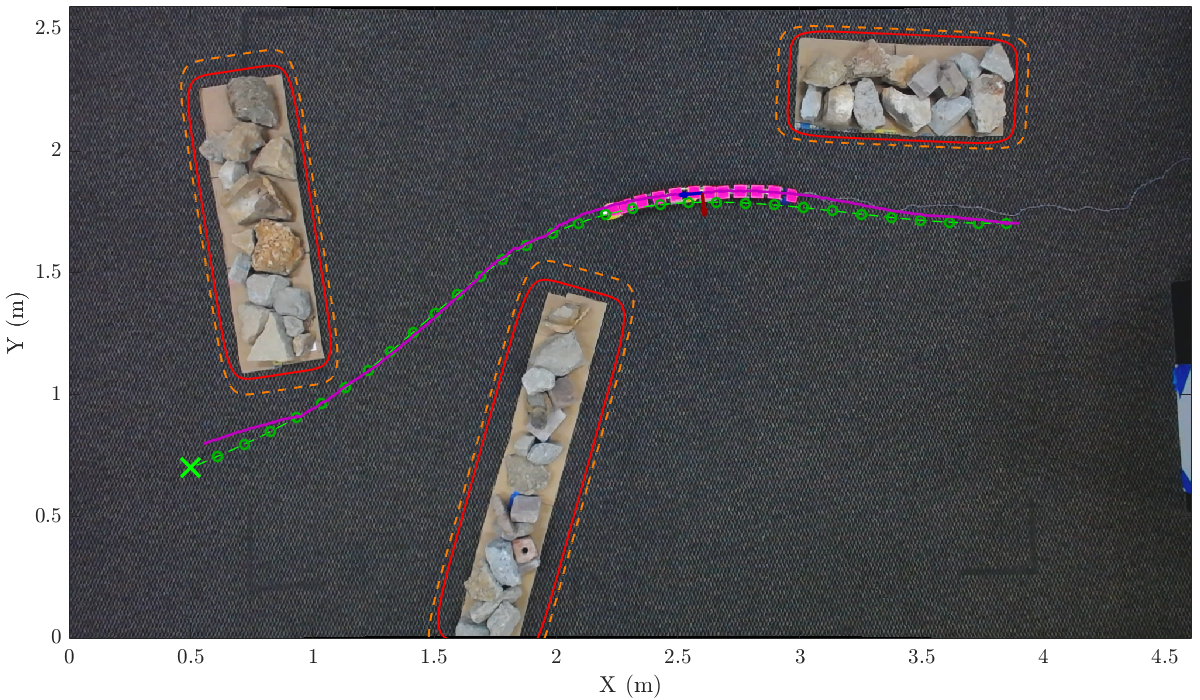
How to successfully plan and execute trajectories for snake robots still requires investigation. Besides working out the dynamics, it is important to also work out the body - environment interactions. For example, if the robotic snake should not touch or hit any obstacles, then incorporating that into the planning is interesting because Snakey is an articulated robot. Its shape can change based on the motor commands. First we modeled snakey as points, then as a set of three smaller boxes, and finally as a bending tube (in 2D and 3D). This progression got tougher and tougher to model and incorporate mathematically, which meant that we had to create new approaches to synthesize the trajectories. Our latest version of cotnrolling Snakey during rectilinear locomotion using the tube model is below.
You can see the tube overlay in yellow. Sometimes the tube doesn't exactly fit. This is because it takes time for Snakey to change from one shape to the next. Within a second or so, it should match the overlay. The obstacle boundaries and their inflated versions, for safety, are also depicted around the obstacle regions. The overlays basically show you what the trajectory planner knows or has computed. Stability of Snakey limits how much Snakey can curve before tipping to the side, which also limits how quickly Snakey can turn. That means this gait is not good for scenarios requiring tight turns. For that Snakey will have to learn a new gait for moving forward, or will have to learn how to turn-in-place. right now we are focused on having Snakey turn in place. After that, we will look into other more manueverable gaits.