
BioLoco Research
Select by Tags:Gaits Rectilinear Sally Snakey All
Research supported in part by National Science Foundation. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Template by Bootstrapious.com & ported to Hugo by Kishan B
Creating Snake-Like Robot-Ground Interactions.
Abstract: To reproduce the locomotion modalities associated to snakes requires achieving the same robot-ground contact force interactions. Following the biomechanics literature we designed a robosnake scale chassis to put on each of Snakey's joints. Doing so improved locomotion stability.
Snake chassis design involved creating a surface with anisotropic properties. Our initial design involved an exagerated profile for the scales on the ground contacting portion of the chassis. We elected for curved extrusions that extended in width while sharpening to a flat edge. The idea was to act like a sharper version of a fingernail since close up images of snake scales do look like fingernails. Close up views of the scale elements and the chassis are below.
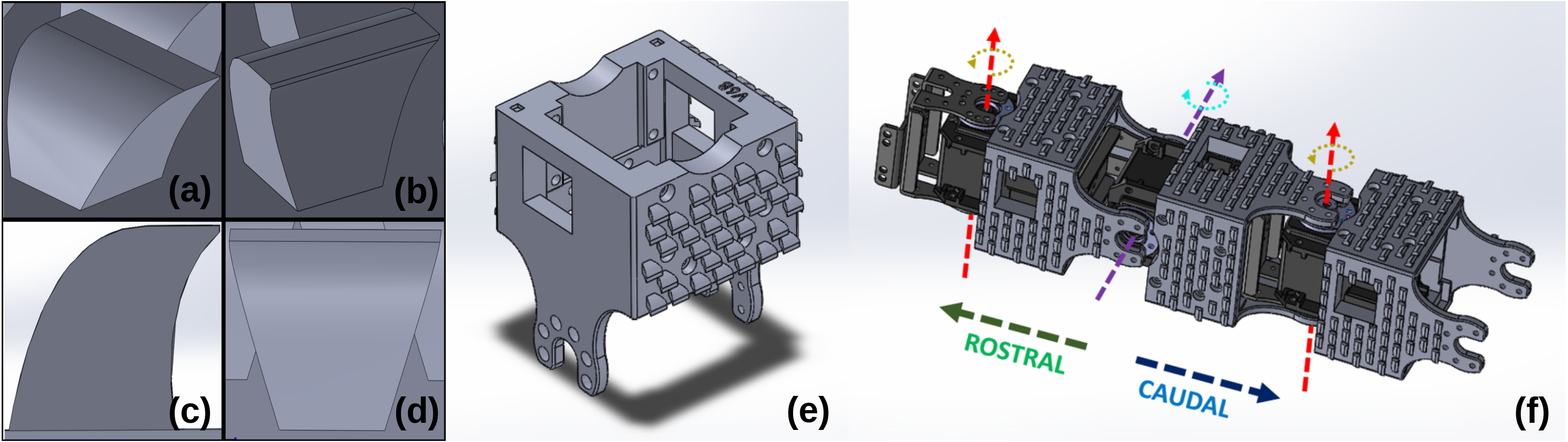
In addition to the scaled version, we designed the top part of the chassis to be flat. Wrapping the snake with thick material (obtained from rugged worker pants) led to an isotropic ground-contact forcing profile. This additional modification permitted comparison with the isotropic baseline, which is a design used when for non-wheeled snake robot designs. Running head-to-head comparisons shows that not only do the scales enhance distance travelled over different ground substrates, but it also stabilizes the direction of motion.
The figures below depict the head-to-head comparisons for three different locomotion gaits on carpet. The upper row is with scales and the lower row is with the isotropic cloth.
Lateral undulation:

 Rectilinear locomotion:
Rectilinear locomotion:

 Sidewinding:
Sidewinding:


If the ground was a bit more slippery with less give in it (like concrete), then the isotropic surface profile had a higher heading variance and could not move straight. The anisotropic, scaled surface drifted some, but preserved the direction of motion much better. For more details the manuscript is here. You can also see some of the head-to-head races on this YouTube playlist.