
BioLoco Research
Select by Tags:Gaits Rectilinear Sally Snakey All
Research supported in part by National Science Foundation. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Template by Bootstrapious.com & ported to Hugo by Kishan B
IVALab BioLocomotion Robots
So far we have one truly functional robot, Snakey. The rest are undergoing rebuilds. You can learn about what we are doing with each robot by following the tag link with their name on the left. No tag means nothing is ready yet.
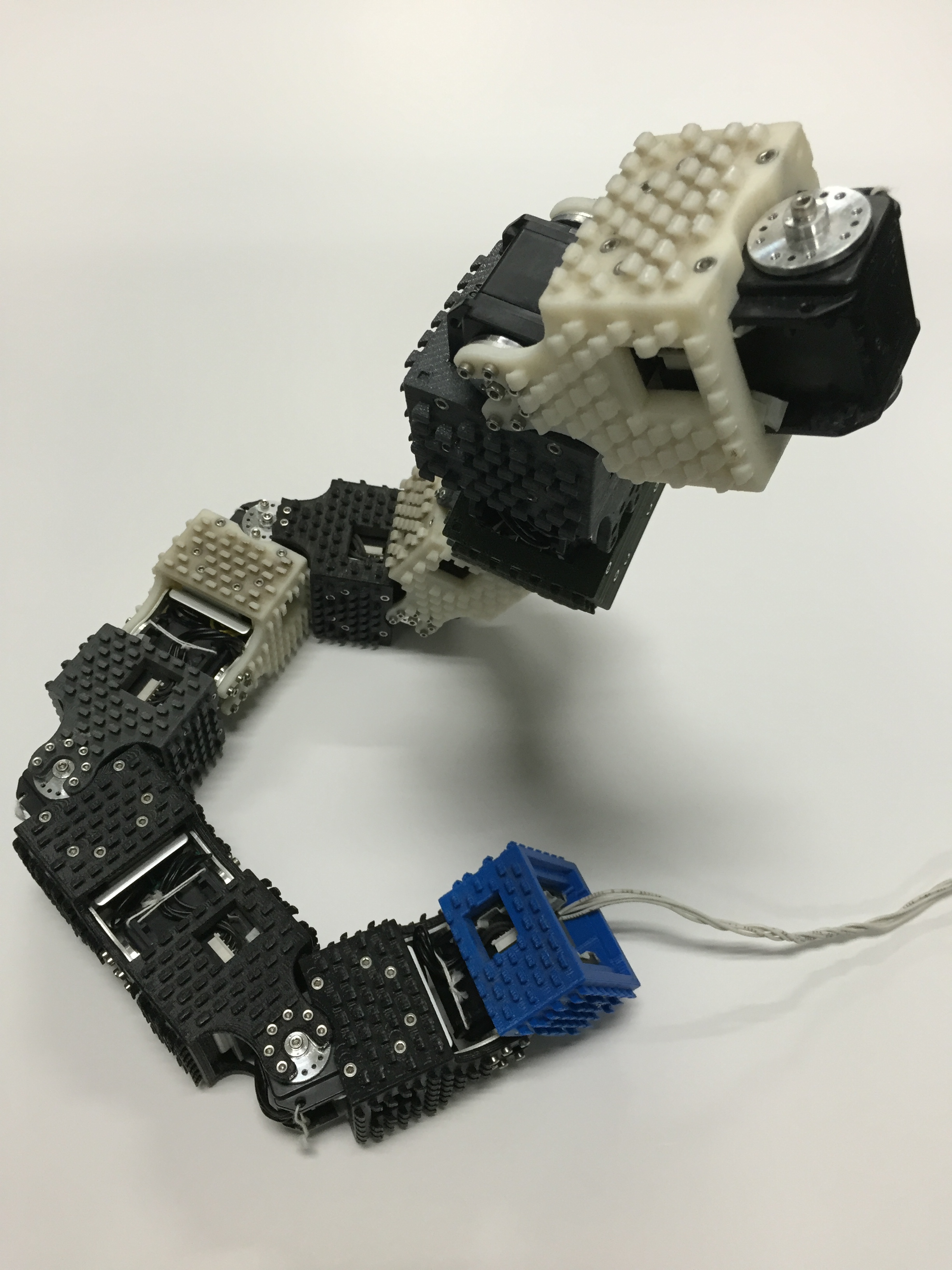
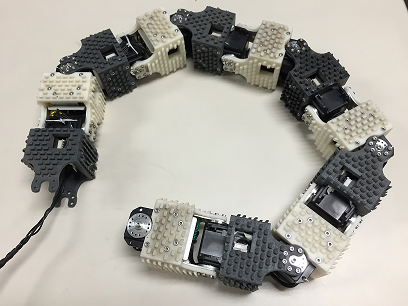
Snakey
This robotic snake sports custom scales on the bottom side (can be seen in the photos), whose role is to help snakey locomote. They work well except when on smooth surfaces. Unfortunately, snake locomotion is horrible on smooth surfaces since it relies on friction. We are working to give snakey a foot on the last link so he can push himself along like a caterpiller. Sort of like in this youtube video, where the rear-most foot is making all of the action happen. Every once in a while Snakey will sport a head consisting of a wireless monocular or stereo camera for testing out our SLAM and Visual Navigation algorithms.
Sally
We have a once functional robot, Sally the Supermander, who apparently was used to scavenge motors from. We are in the process of bringing her back to her original glory.

Kitty
And we have a small quadruped that needs lots of love to get functional again, Kitty the Robocat (aka Crookshanks).

Off-and-on we are working towards creating a small Gorilla-bot and some other fun biologically-inspired robots that could be used to showcase the mathematics and algorithms we've derived.
You can see what our robots have achieved on this YouTube Channel.