
BioLoco Research
Select by Tags:Gaits Rectilinear Sally Snakey All
Research supported in part by National Science Foundation. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Template by Bootstrapious.com & ported to Hugo by Kishan B
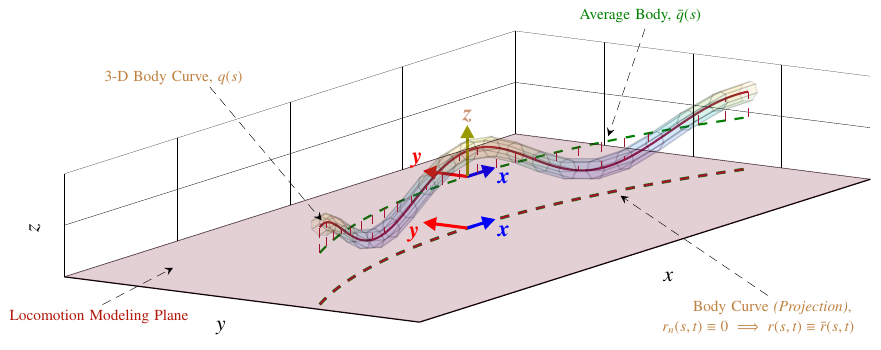
Modeling Planar Snake Movement.
Abstract When the correct representation for modeling snake movement is chosen, then deriving equations of motion for snake movement on a flat plane is fairly easy. Furthermore, one overall dynamic model provides a unified approach to modeling many different gaits. So far, we have modeled rectilinear locomotion, lateral undulation, and sidewinding. A turn-in-place gait is currently under study.