
RoboSLAM Research
Select by Tags:Benchmark GoodFeats LoopClose Map2Frame All
Research supported in part by National Science Foundation. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
NSF #1816138
AFRL
Template by Bootstrapious.com & ported to Hugo by Kishan B
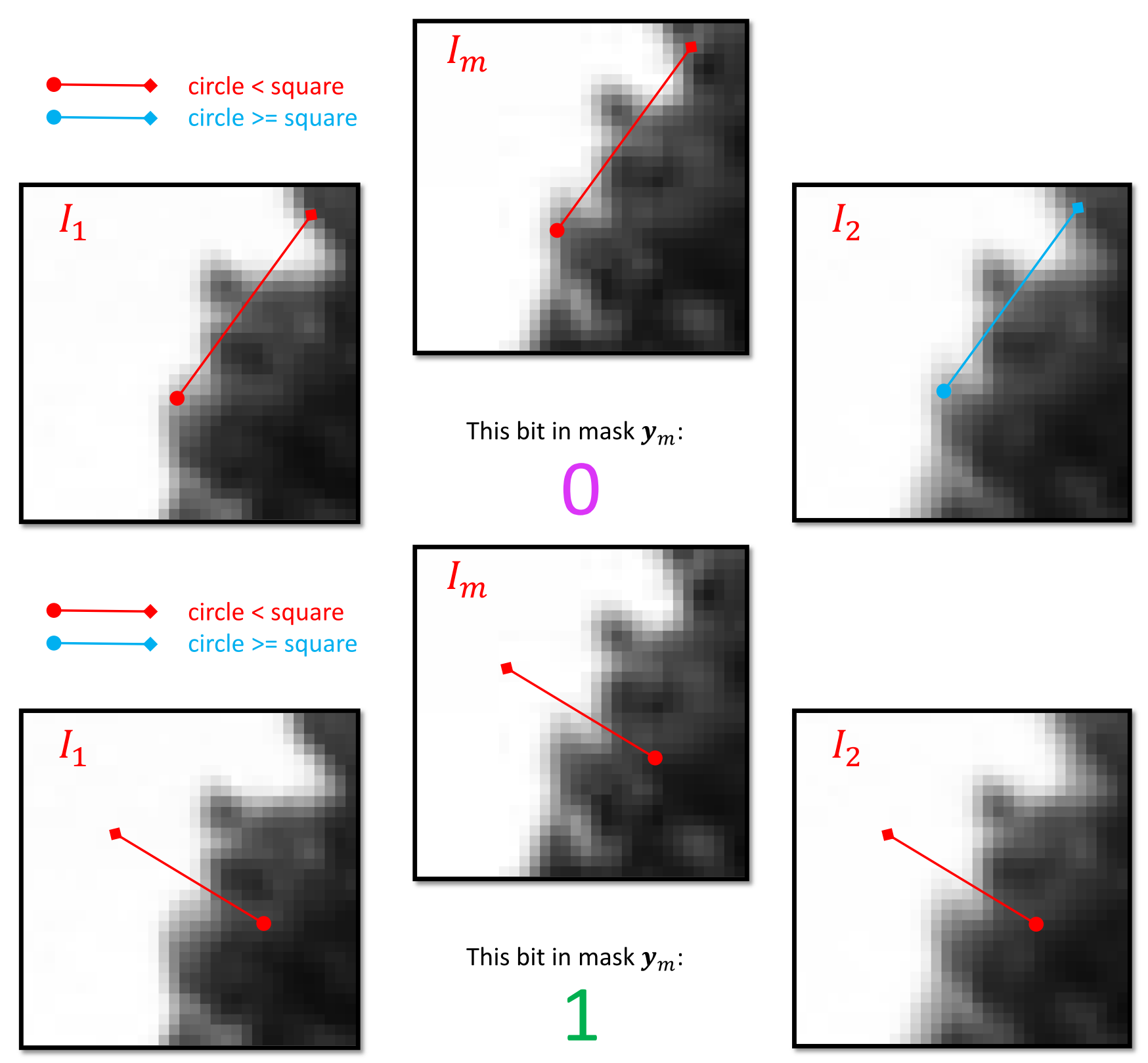
Online Binary Feature Learning for Loop Closure
Abstract: Loop closure is an essential module in long-term SLAM, as detecting and recognizing re-visited locations serves to bound localization drift and correct for geometric map distortions. It also provides a mechanism to recover from track loss. However, most methods employ offline learnt maps that cannot be customized to the feature space of new environments. This work explores a means to generate a loop closing map with online adaptive properties.